The main thing was getting the layout for all the pieces right. As you can see, I first made templates from paper, and all that scrawling on the left shows how much work it took to remember all that stuff I had learned and then forgotten in Trigonometry class...


I wanted to have the F-14 in a 15 degree climb, and wanted the base to be a little more dynamic than just a flat sheet of styrene. I ended up being a little off in the cutting, but instead of starting over I just filed and sanded till it was mostly correct again. In the next two photos you can see my completed template.


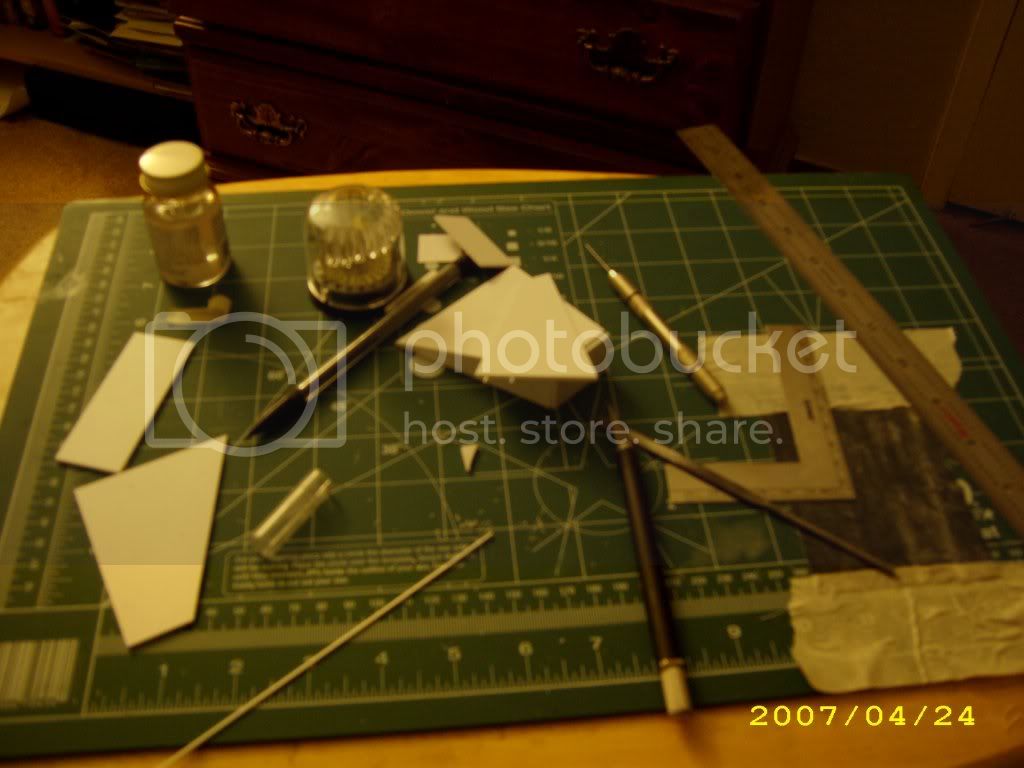
The camera I have available to me isn't that good, this was the only photo I had that was somewhat usable. I used a squaring ruler to ensure the two sides of the base were square after glueing. The tape was to help hold them in place.

I mismeasured the back piece for the stand, as I had forgotten to take into account the thickness of the plastic compared with paper. It didn't matter though, because I was able to fix it with a piece of strip styrene.

After marking the center of the base where the arm of the stand goes, I made the bottom of the arm true by holding it against a square while sanding it:

I had bought the assorted pack from Evergreen but it lacked round styrene rods, it only had square rods, and the largest bit on my pin vise wasn't big enough, so I carefully scraped the rod down to size before placing them in the holes I drilled into the arm and base.
Finally, I tested the fit, and it fits very well! I also used a file to bevel the edges of the base, to reduce the boxiness a bit. All that is left is to clean it up, primer it and paint it, though I am not sure what color I want to paint it yet. I want to have a white bar on the front of the base because I saved the name decal from my F-14 kit to label the base, but for the rest of the base I am drawing a bit of a blank. I've been considering aluminum, but might just try a different scheme. I have a lot of sea blue that could be put to use too...

The thread with my F-14 WIP can be found here.